|
Introduction
At solution of engineer-technical and other applied problems often happens it is necessary to find the certain order derivative from tabular given function
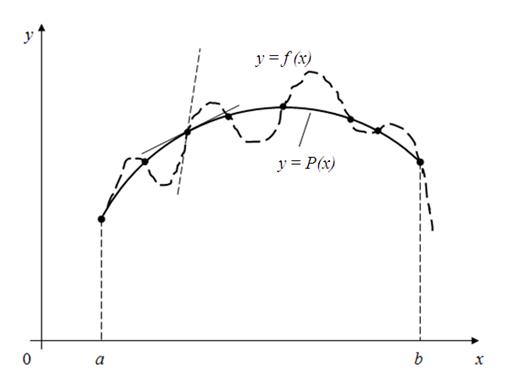
One of the simplest formulas for
calculation of
function
where
h
– step,
Sometimes given function
at
Similarly higher orders derivatives of function
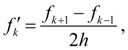
If an error of interpolating function
then error of derivative
i.e.
error of interpolating function derivative is equal to derivative of this function error
. It is fair and for derivative of higher orders. Generally speaking, numerical differentiation is operation of less exact, than interpolation of function, differently affinity to each other ordinates of functions
Fig. 1. Difference in derivatives of given function y = f ( x ) and interpolating function y = P ( x ) |